Basic Drone Design
The Basic Drone Design module helps users determine a suitable drone configuration based on simple user inputs. Through this process, users can evaluate the expected performance of the final drone and estimate its overall cost. The workflow consists of the following five steps:
1. Mission Definition
2. Design Variables
3. Performance Analysis
4. Component Selection
5. Final Report
Note: The Basic Design Module is currently under active development. Certain calculation features may be incomplete or subject to modification based on user feedback and continued validation efforts.
1. Mission Definition
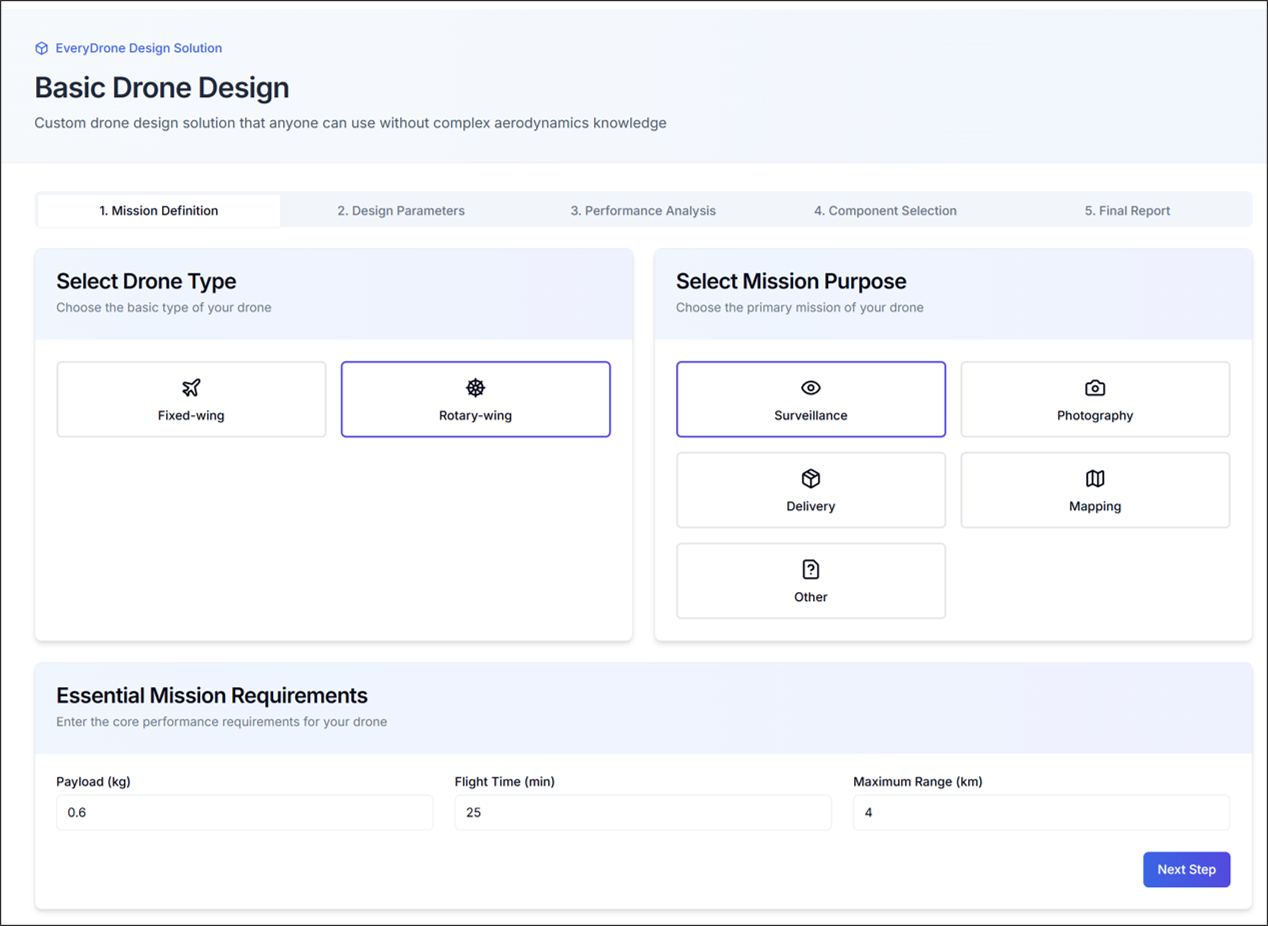
1.1. Select Drone Type
Select the drone configuration type: Fixed-wing or Rotary-wing.
1.2. Select Mission Purpose
Specify the intended application of the drone design. The available categories are classified into four primary mission types:
- Surveillance
- Photography
- Delivery
- Mapping
For use cases that do not fall within the listed categories, select Other to proceed with a custom design based on user-defined requirements.
Essential Mission Requirements
Define the core performance requirements for the drone as follows:
- Payload (kg): The weight the drone is required to carry during operation.
- Flight Time (min): The expected duration of continuous flight per battery cycle.
- Maximum Range (km): The maximum mission distance the drone must cover.
Upon entering all required values, select Next Step to proceed to the Design Parameters configuration stage.
2. Design Parameters
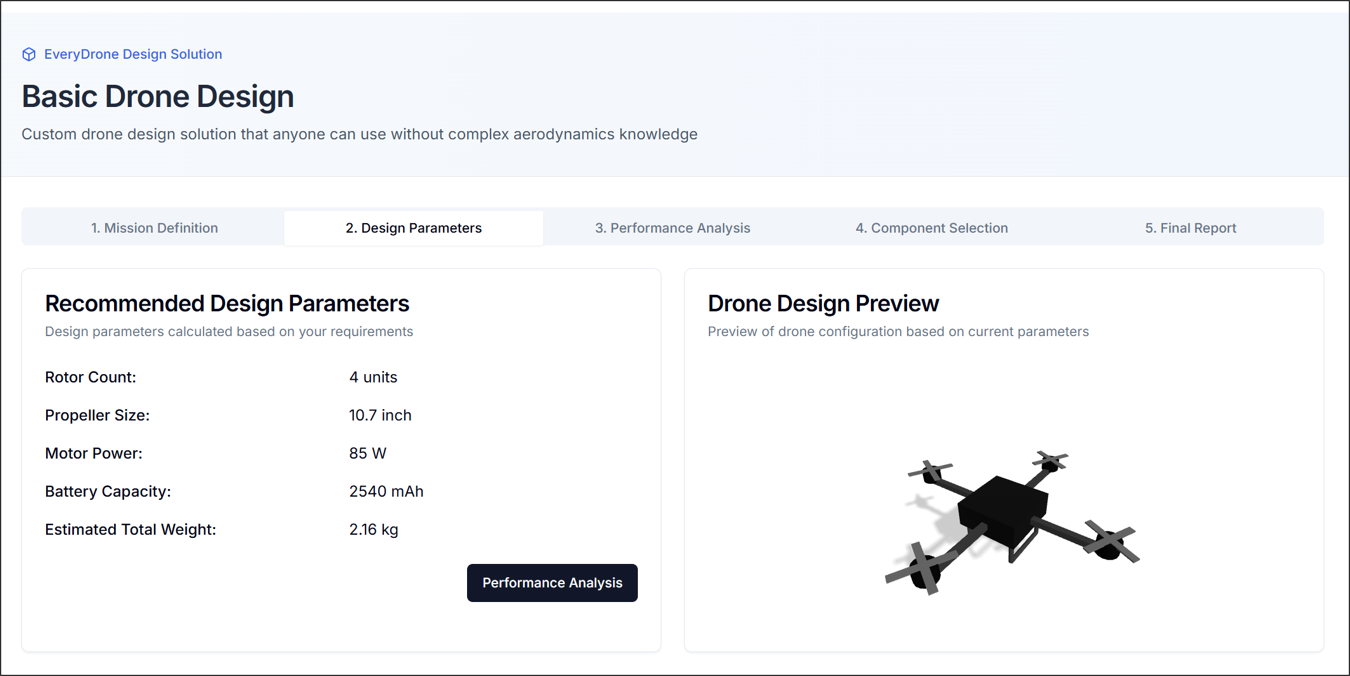
Recommended Design Parameters
Based on the previously entered values for Payload, Flight Time, and Maximum Range, the solution automatically recommends design parameters.
The recommended design parameters include the following specifications:
- Number of rotors
- Propeller size
- Motor power
- Battery capacity
- Estimated total weight
If the generated information appears to be correct, proceed to the next stage by selecting the Performance Analysis button. If any values were entered incorrectly or require adjustment, return to the Mission Definition stage to modify the input parameters accordingly.
Drone Design Preview
A three-dimensional representation of the estimated drone configuration is provided for visual verification and preliminary assessment.
3. Performance Analysis
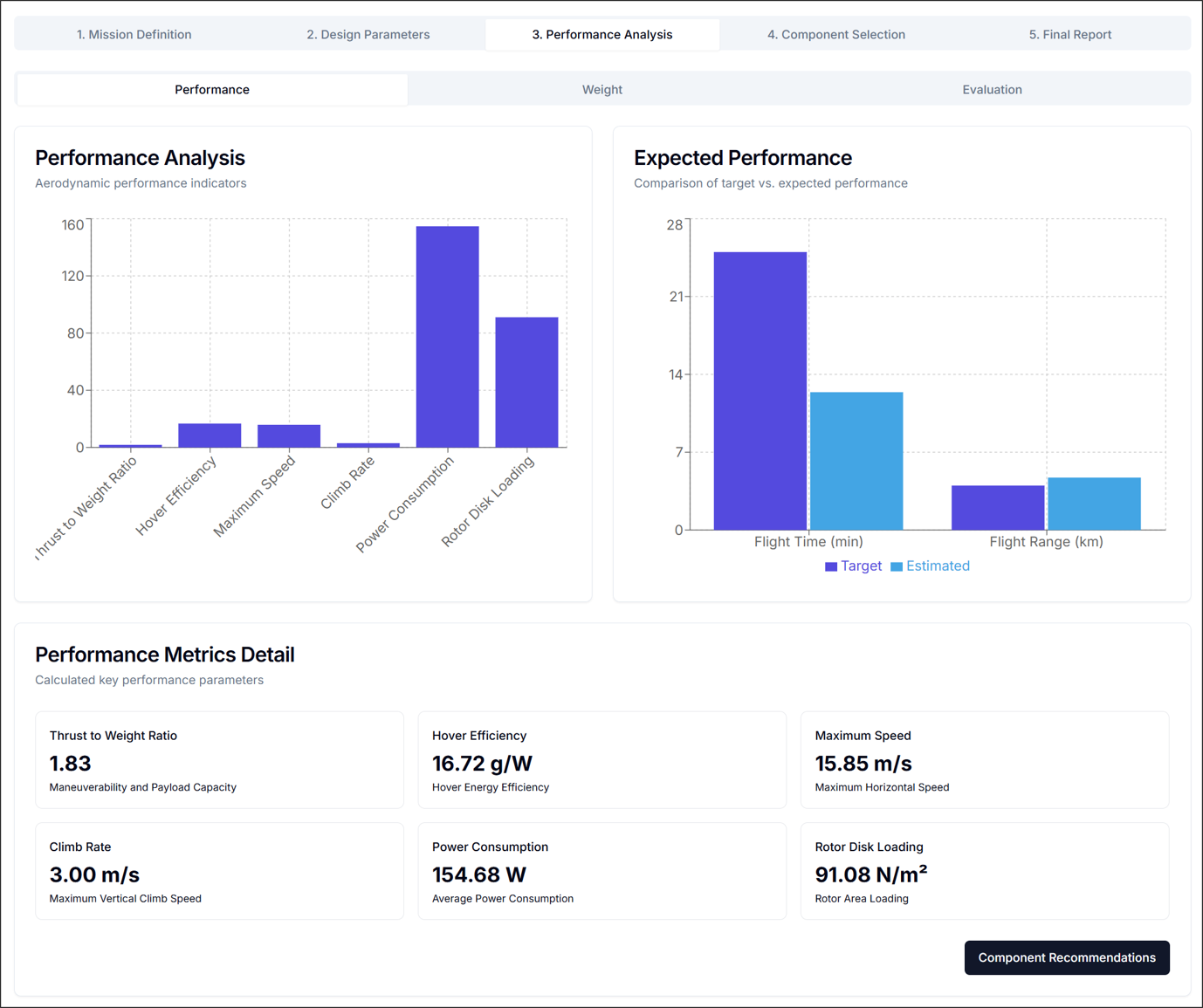
Based on the configured input data, the actual drone performance is evaluated. As illustrated in the figure, six key perfomance parameters are presented numerically, along with three graphs representing the perspectives of Performance, Weight, and Evaluation. The parameters assessed are as follows:
- Thrust-to-Weight Ratio
- Hover Efficiency
- Maximum Speed
- Climb Rate
- Power Consumption
- Rotor Disk Loading
Performance
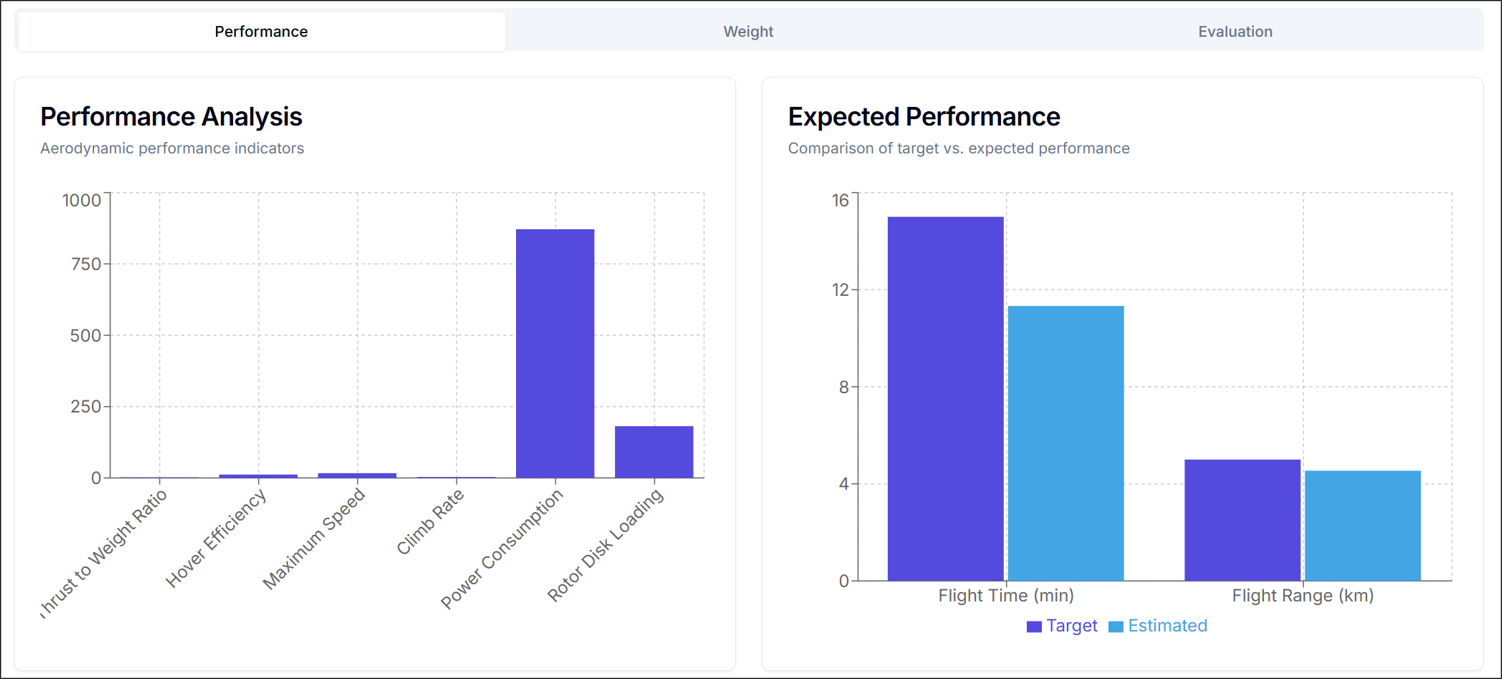
The Performance graph displays the evaluation of six drone performance metrics, along with the differences between the set values and estimated values for flight time and flight range.
Weight
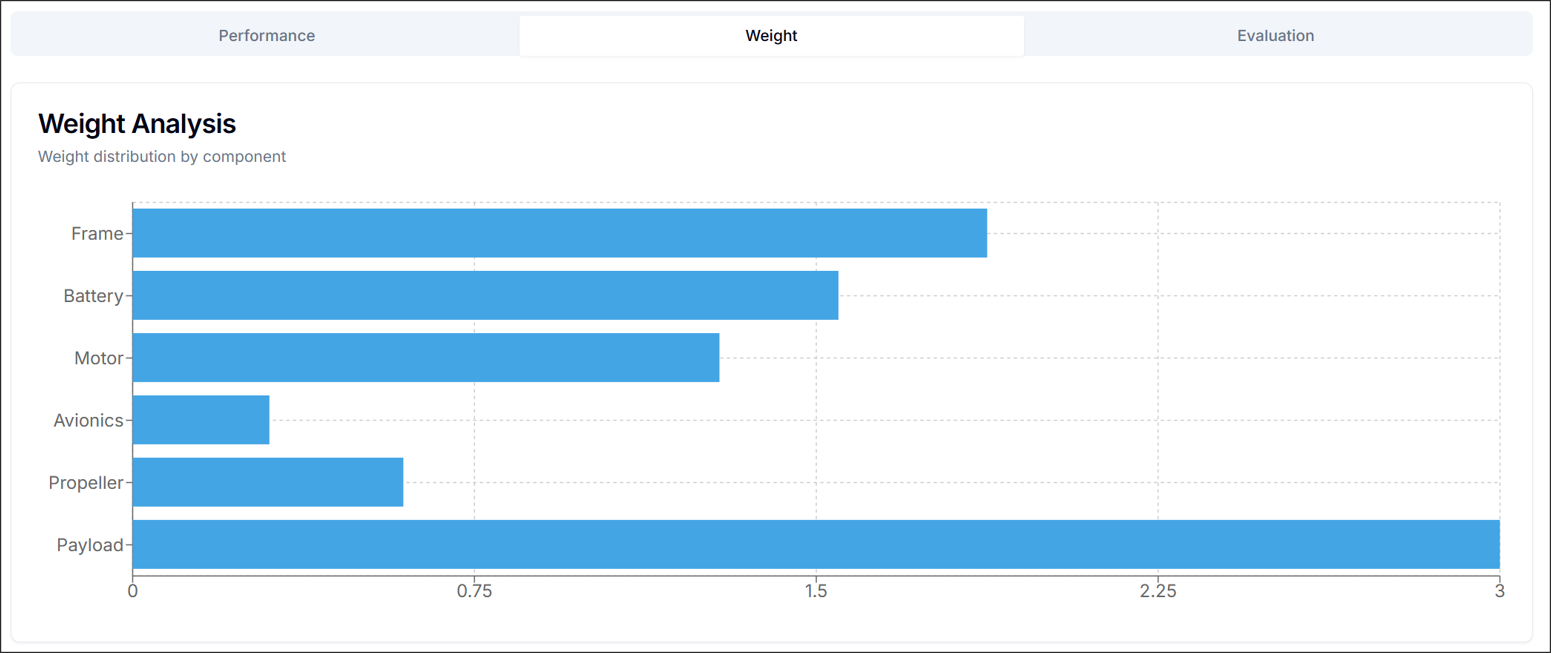
The Weight graph illustrates the estimated weight distribution of the drone components. The components are broadly categorized into Frame, Battery, Motor, Avionics, Propeller, and Payload.
Evaluation
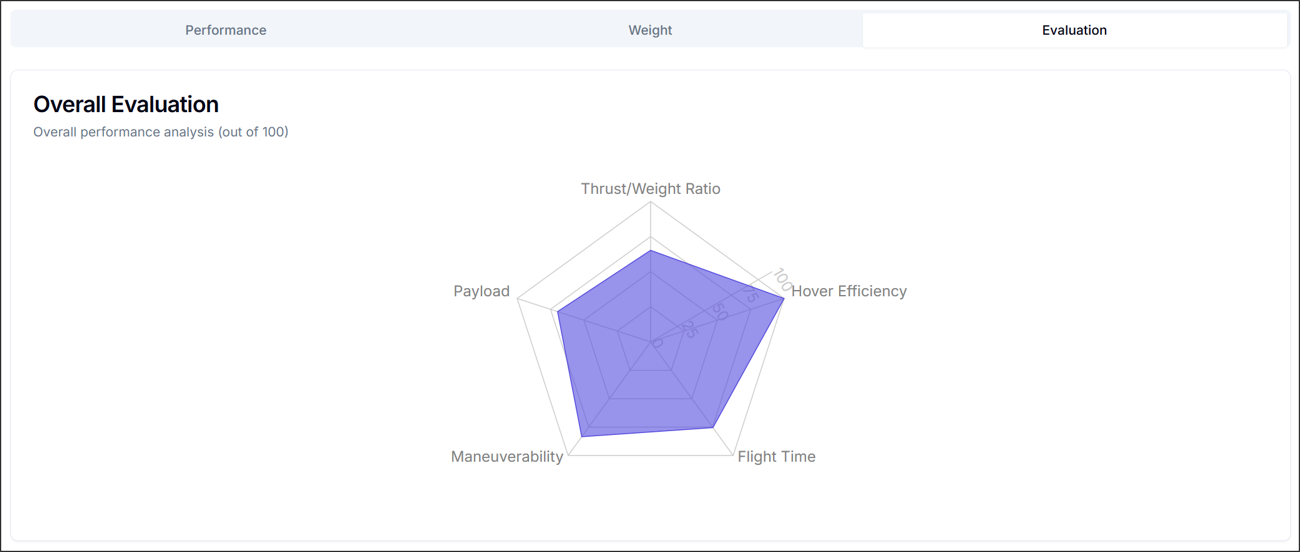
The Evaluation graph presents the overall drone performance assessed against a 100-point scale based on five criteria. These criteria are as follows:
- Thrust-to-Weight Ratio
- Hover Efficiency
- Flight Time
- Maneuverability
- Payload
After reviewing the drone performance analysis results, proceed to the next step by clicking the Component Recommendations button.
4. Component Selection
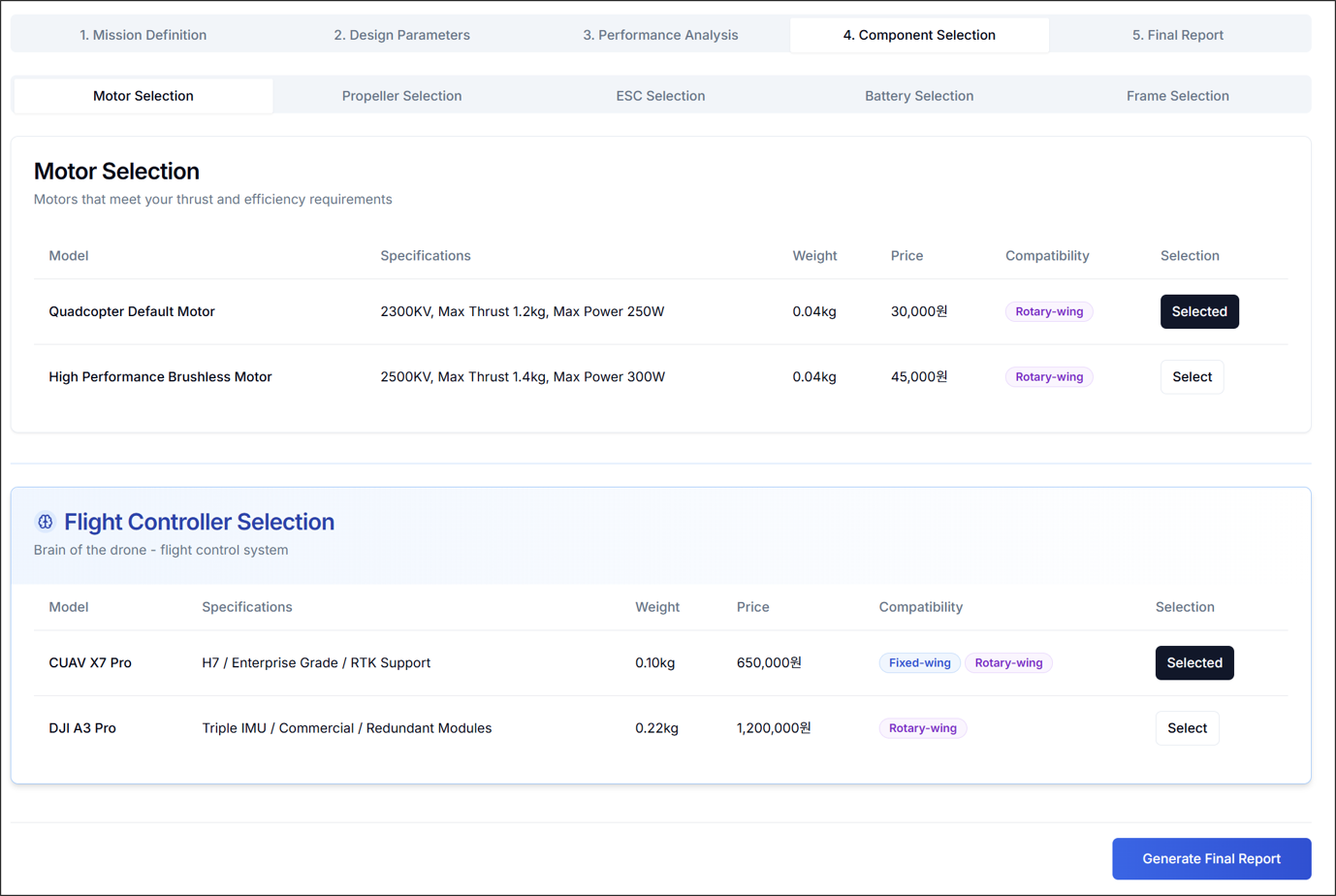
The component selection process involves choosing appropriate products for the motor, propeller, ESC, battery, frame, and flight controller (FC). Among these, the selection of the FC component is always shown. Each component is also classified according to its suitability for fixed-wing or rotary-wing configurations.
Once all components have been selected, proceed to the next step by clicking the Generate Final Report button.
5. Final Report
The final drone performance is evaluated based on the selected components. The evaluation is organized into the following four sections:
- Performance Summary
- Safety Analysis
- Cost Analysis
- Recommendations
Performance Summary
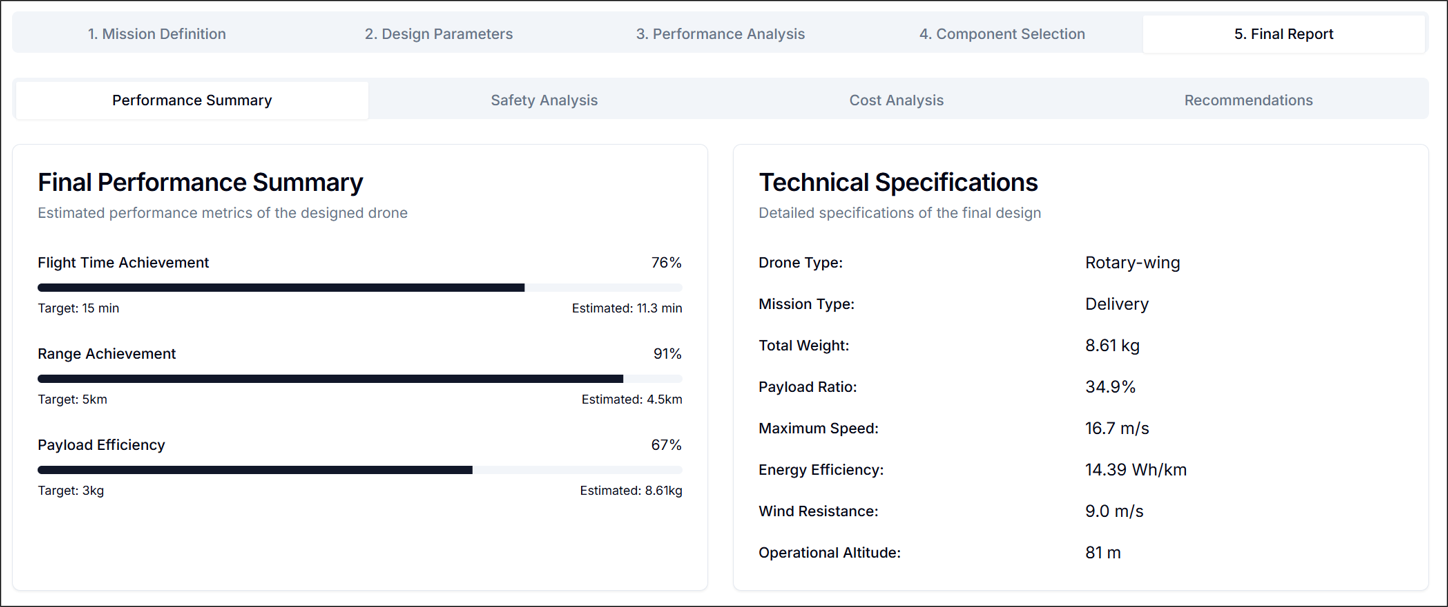
Final Performance Summary
This section presents the differences between the target drone performance and the estimated performance based on the selected components.
Specifications
This section displays the specifications of the drone as it would be constructed using the selected components.
Safety Analysis
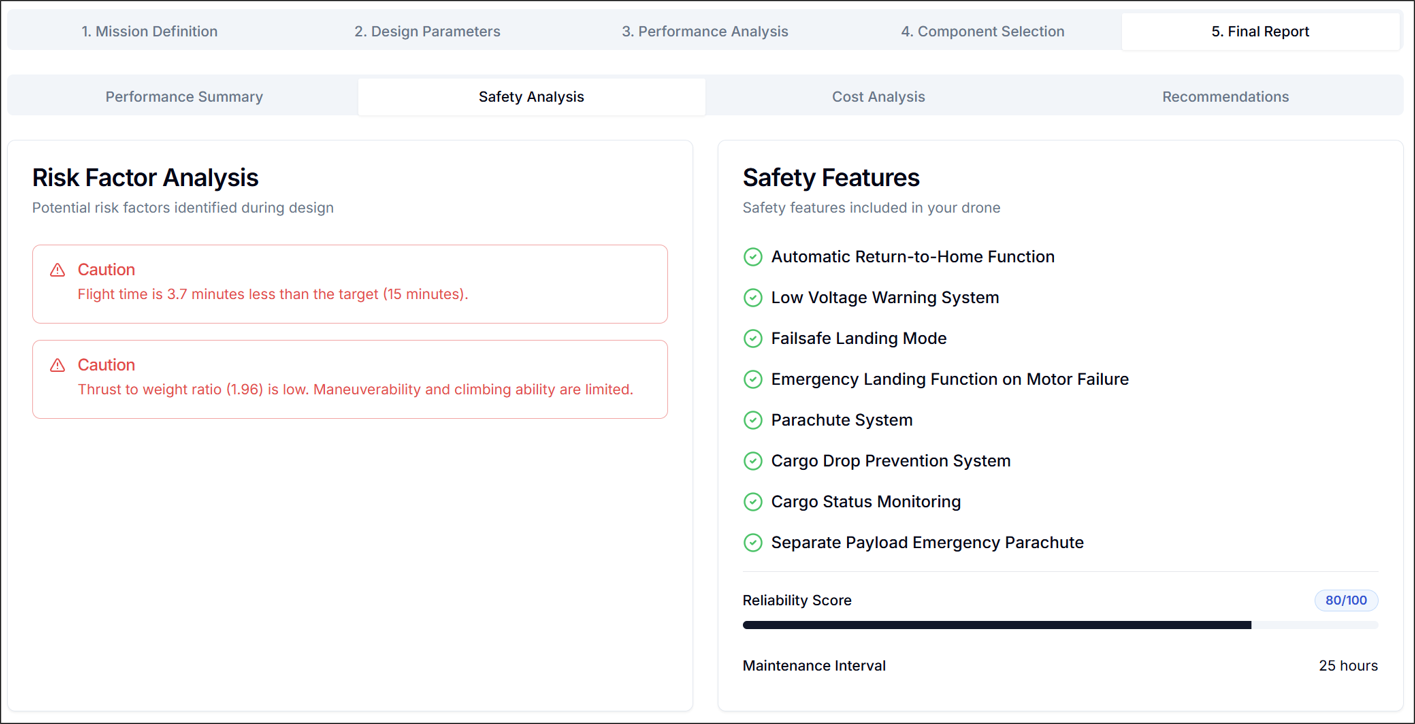
Risk Factor Analysis
The Risk Factor Analysis identifies potential hazards associated with the actual manufacturing and operation of the drone. The risk factors provided are as follows:
- Common: Flight Time, Flight Range, Payload Ratio
- Fixed-Wing: Lift-to-Drag Ratio, Stall Speed, Climb Rate
- Rotary-Wing: Low Thrust, High Thrust, Hover Efficiency, Payload Ratio Relative to Number of Rotors
Safety Features
This section identifies the safety factors of the drone and provides information on maintenance intervals.
Cost Analysis
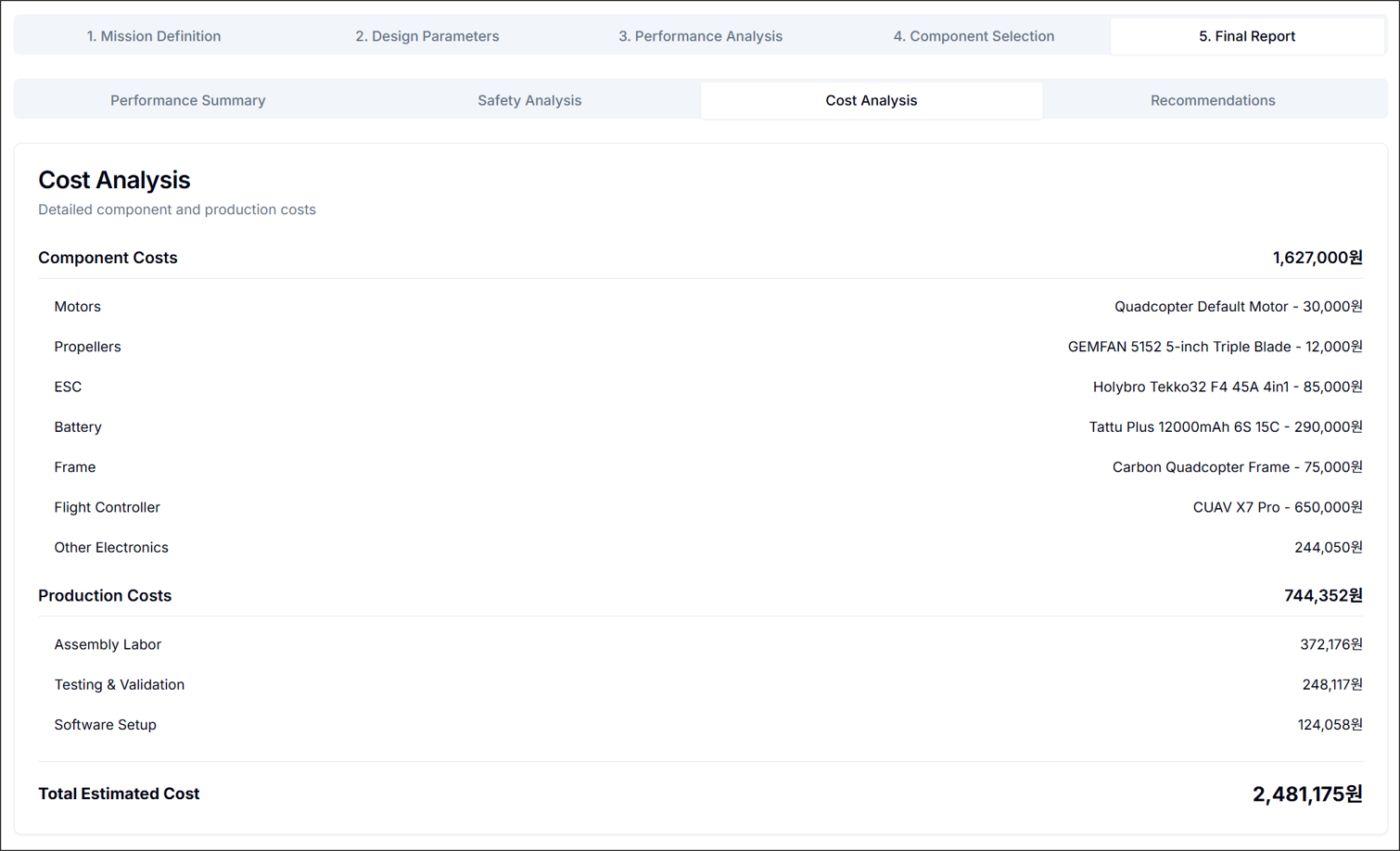
This section compiles the cost estimates for the components selected during the Component Selection process.
Recommendations
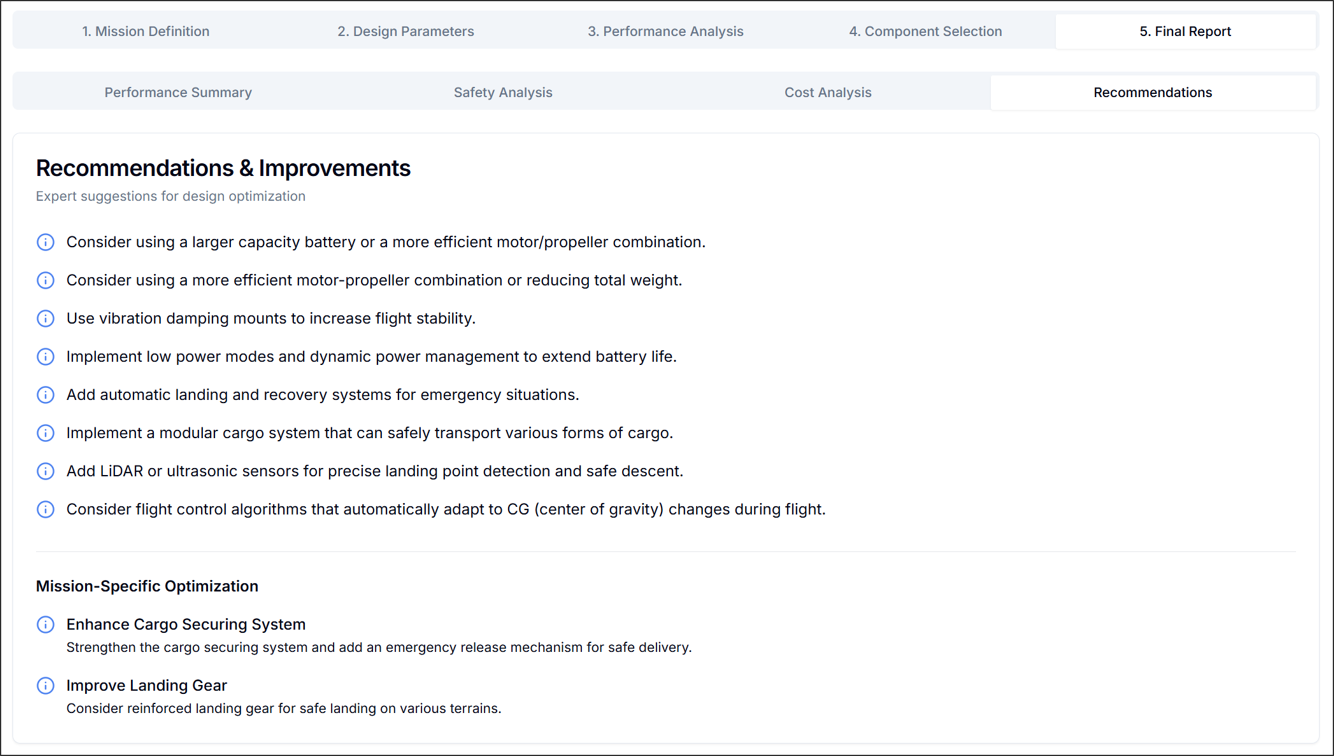
Recommendations & Improvements
This section provides comments on additional factors to consider for performance enhancement. The comments are organized based on the following categories:
- Common: Flight Time, Flight Range
- Fixed-Wing: Lift-to-Drag Ratio, Stall Speed, Climb Rate, Cruise Control, Gust Response, Landing Gear
- Rotary-Wing: Thrust-to-Weight Ratio, Throttle Limits, Propeller Efficiency, Motor Performance, Vibration Damping, Power Management, Emergency Systems
- Mission Purpose: Photography, Delivery, Surveillance, Mapping, Other
6. Feedback & Future Updates
-
Improving Prediction Accuracy The current estimation methods may deviate from actual results under real-world manufacturing and flight conditions. Continuous updates are planned to enhance prediction accuracy.
-
UI Enhancements We are committed to continuously improving the user interface to ensure a more user-friendly experience.
-
Integration with Advanced Simulation Design data will be seamlessly transferable to FEA/CFD modules for advanced structural and aerodynamic analysis.
We always welcome your suggestions to improve the calculators or introduce new parameters.
Stay tuned for regular updates as we continue refining the Basic Drone Design with more accurate formulas, enhanced visuals, and deeper integration with the Advanced Simulation.
Need Assistance or Have Questions?
Frequently Asked Questions: FAQ Link
Support Inquiries: support@everysim.io