드론 계산기 개요
드론 계산기는 사용자가 입력한 주요 파라미터를 바탕으로 드론의 성능을 예측하는 도구입니다. 다음과 같은 주요 기능을 제공합니다:
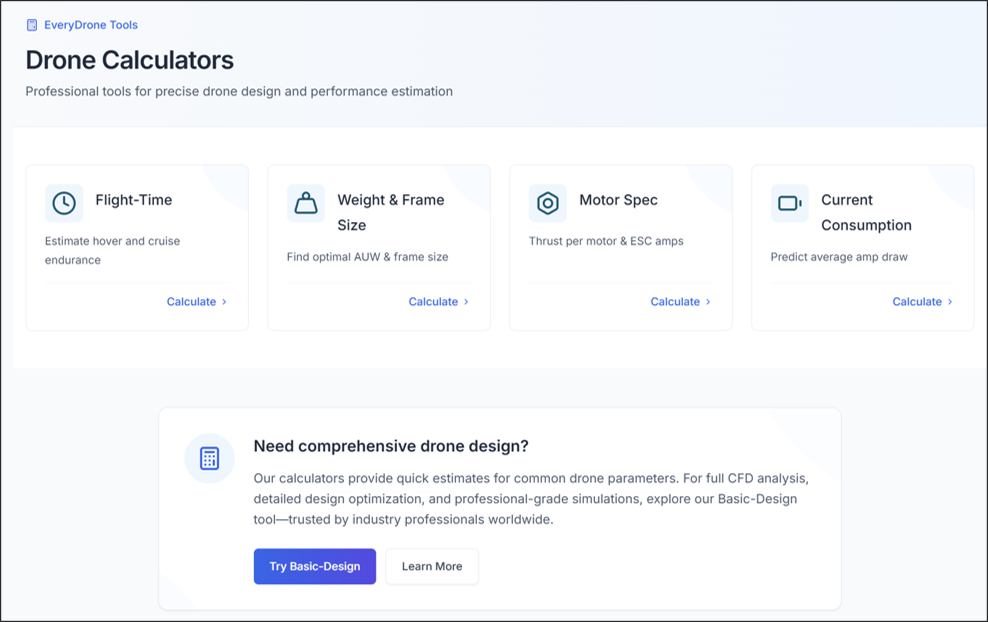
- 비행 시간: 드론의 총 무게, 배터리 용량, 전압 등 다양한 요소를 바탕으로 최적의 비행 시간을 산출합니다.
- 무게 및 크기: 프레임 크기, 페이로드, 배터리 무게, 모터 개수 등을 고려하여 적정 프레임 무게와 크기를 계산합니다.
- 모터 사양: 총 중량, 추력대중량비, 배터리 셀 수 등을 바탕으로 최적의 모터 사양을 산출합니다.
- 전류 소비: 총 중량, 모터 개수, 전압, 비행 모드 등을 바탕으로 필요한 배터리 용량과 예상 비행 시간을 계산합니다.
각 계산기 설명
2.1. 비행 시간
호버 시간은 드론이 제자리 비행 시 최대 시간으로, 배터리 용량과 전력 소비를 기반으로 계산됩니다.
드론의 호버 시간, 순항 시간, 비행 거리를 계산하며, 배터리 방전 그래프를 통해 비행 프로필을 시각적으로 파악할 수 있습니다.
2.2. 무게 및 크기
드론의 총 무게와 프레임 크기가 적절한지 평가하며, 프로펠러 직경, 모터 개수 등을 기반으로 디스크 로딩을 계산합니다.
2.3. 모터 사양
선택한 모터가 드론 설정에 적합한지 평가하며, 모터당 필요한 추력과 ESC 전류 요구사항을 계산합니다.
2.4. 전류 소비
드론의 비행 모드에 따른 평균 전류와 피크 전류를 추정하며, 배터리와 ESC의 적합성을 평가합니다.
빠른 시작
각 계산기에는 기본 이론 섹션이 포함되어 있어 계산 원리를 이해할 수 있습니다. 계산기를 사용하기 전에 해당 섹션을 참고하시기 바랍니다.
도움이 필요하신가요?
자주 묻는 질문: 자주 묻는 질문 링크
지원 문의: support@everysim.io